AI学习时间 13 - Actor-Critic 方法
#强化学习 #Actor-Critic
#动作优势 #在线学习
复习
- 为了让智能体“真正学会”奖励点与惩罚点,需要
- 通过叠加状态的编码方式传递环境信息
- 通过经验重放来避免灾难性遗忘
- Q 学习 使用“巨大的 Q 值表”来维护与更新 Q 值
- 深度 Q 学习 是使用深度网络来预测 Q 值
GridWorld 里的强化学习思路整理
之前我们一直在基于 GridWorld 谈论强化学习,在 GridWorld 这个例子里,如果我们希望训练一个智能体能学到不同类型的格子,能努力走到奖励点,训练过程如下
- 开始一次尝试
- 状态叠加编码,交给深度 Q 网络预测动作 Q 值分布
- 通过 \(\varepsilon\)-贪心策略选择一个动作
- 执行这个动作,环境给与反馈(是否终止)
- 如果没终止就回到 2,终止的话
- 到达惩罚点,削弱这次尝试所选择的动作概率
- 到达奖励点,增强这次尝试所选择的动作概率
当然在 4 我们还会收集这条经验信息,将其放到经验回放器里,然后通过小批量的方式训练深度 Q 网络。不过从这个训练过程我们看到一个问题,那就是 每次尝试,都需要到达终点(惩罚点或者奖励点),我们才能强化这条路径上的动作。
这种方法对于下棋,或者 GridWorld 这类环境来说是没问题的,因为在这些环境里,环境都有一种离散的明确的规则:
- 下一步棋,走一步,环境发生确定性变化
- 有一个终止
- 终止有明确奖励(或惩罚)
这样才能满足上面的训练流程。
连续状态,连续动作
在大多数真实环境里,环境是连续的,动作可能也是连续的,这样在尝试过后,很难对“具体”的环境状态及动作进行强化。比如我们要使用强化学习对火箭回收进行训练与学习,在火箭降落的过程中,整个过程中火箭的位置是连续的,在每个位置,需要根据当时的风向,气压,温度等综合条件(环境),进行不同方向的喷射(动作)而调整火箭的方向与角度,最终安全降落(奖励),整个降落过程中的任意失误,比如火箭角度出问题,下降速度过快等,都会造成火箭爆炸或者降落失败(惩罚)。在这个场景下,每两次(模拟)尝试都不会有相同的环境与动作序列,在这种情况下,应该如何进行强化学习呢?
在强化学习之后,火箭是需要在真实环境中进行回收操作的,而在真实环境中又是一个连续多变的场景,这要求我们对学习训练进行如下的改变:
- 指导动作选择的 Q 值是一个概率分布,而不是一些枚举动作的 Q 值,因为动作也是连续的,无法枚举。
- 任何过程中的惩罚都是灾难性的,不能等到有最后结果才加强过程中的动作,而是在选择之后就需要尽快得到合适的强化手段。比如某次喷射会导致火箭失衡(到一定程度),那就需要减少该喷射的参数。
对于第一点来说比较容易做到,我们之前使用深度 Q 网络来预测 Q 值,先在只需要将深度 Q 网络改为预测 Q 值分布即可。在计算机里,其实分布也是一个离散函数,只是用更多的值来模拟而已。
%%{
init: {
'themeVariables': {
'edgeLabelBackground': '#fff',
'edgeLabelColor': '#333',
'edgeLabelFontSize': '14px'
}
}
}%%
graph LR
State[状态] -->|输入| Q[深度Q网络]
Q --->|输出| Dist[动作Q值分布]
而对于第二点来说,我们希望在每一次动作之后就能有一个即时反馈(而不是等到整个试验结束),此时需要引入一个动作优势(action advantage)概念。
动作优势
回顾我们之前提到的两个价值函数,状态价值函数与动作价值函数。状态价值函数对状态进行评价,将当前状态量化为一个评分数值。
graph LR
S[状态] --> F[状态价值函数]
F --> V[价值]
而动作价值函数是在某一状态下,执行某一个动作的价值。
graph LR
S[状态] --> F[动作价值函数]
A[动作] --> F[动作价值函数]
F --> V[价值]
而动作优势函数是,计算在当前状态下执行这个动作,能给我带来多少增益?从公式上来看非常简单,它是动作价值函数与状态价值函数之差。
\[ \text{Q}_\text{advantage}(s, a) = \text{Q}_\text{action}(s, a) - \text{Q}_\text{state}(s) \]
其中 \(s\) 为状态,\(a\) 为动作。从公式上来看很容易理解,当我在状态 \(s\) 下执行 \(a\) 动作之后得到的价值是 \(\text{Q}_\text{action}(s, a)\),而原本状态 \(s\) 的价值为 \(\text{Q}_\text{state}(s)\),那么做这个动作带来的增益,就是两者之差了。
将对动作价值的估计,改为对动作优势估计的一类方法,被称为 Actor-Critic 方法。从命名也可以看出,Actor 实际上是智能体遵循一定的策略执行动作,然后这个动作会被进行评判 Critic,这样就能在动作执行之后立刻被评判(评判的是动作的优势),解决了上面提到的第二个问题。
Actor-Critic 方法
下面是整个 Actor-Critic 方法的流程图。
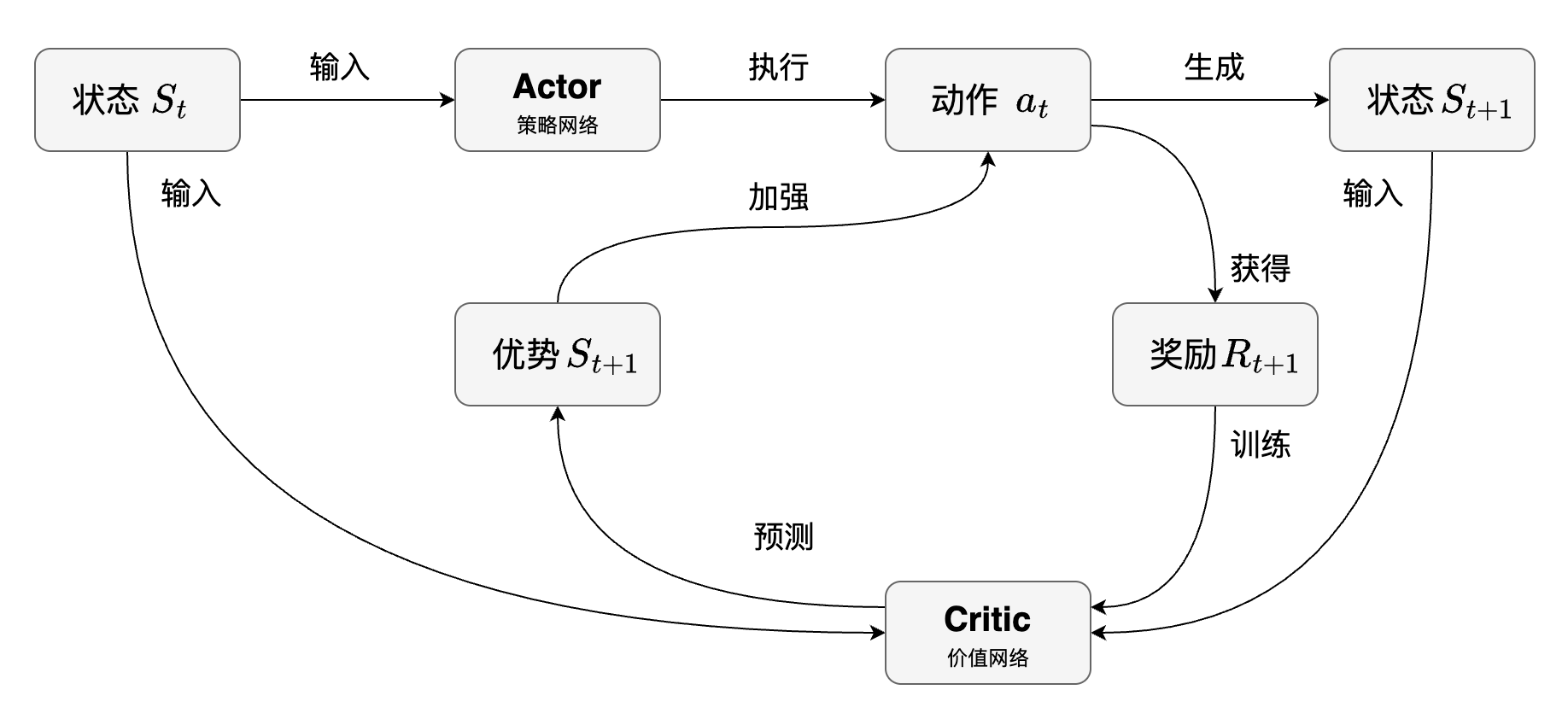
既然计算动作优势需要动作价值函数与状态价值函数之差,这里可以很形象地引入两个角色,一个是执行者(Actor),一个是批判者(Critic)。
- 执行者自己内部有一套决策机制(策略网络),用于决定执行什么动作。
- 批判者内部也有一套决策机制(价值网络),用于判断执行者执行的动作究竟是好是坏。
这套架构和生成对抗网络(后面课程会讲述)有异曲同工之妙,可以更抽象地看为一套很基础的方法论。
从上面的流程图我们看到的两个角色,执行者以及批判者都有自己的网络,但实际训练的过程中,训练一个网络是比训练两个网络要方便很多的,所以在 Actor-Critic 方法在实现的时候,会将两个网络合并为一个。
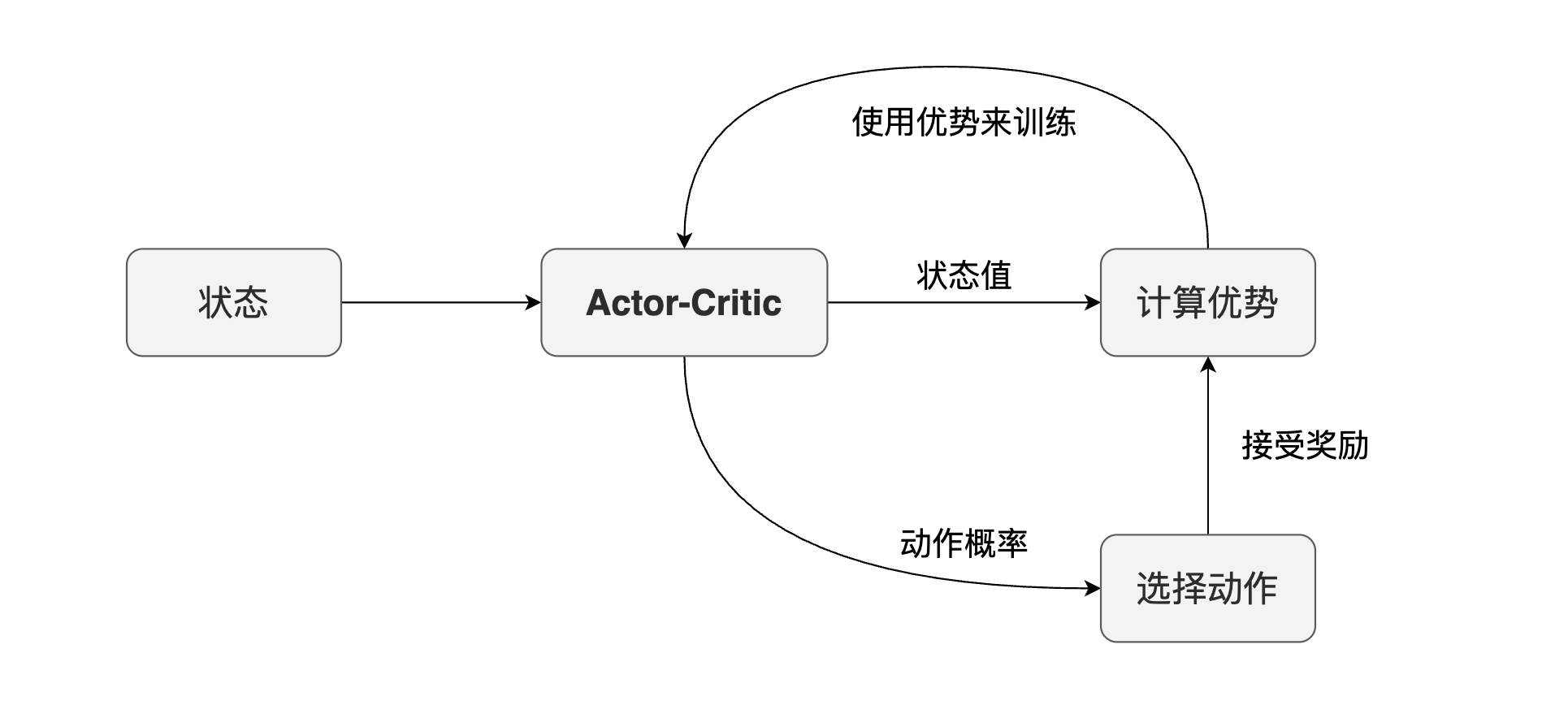
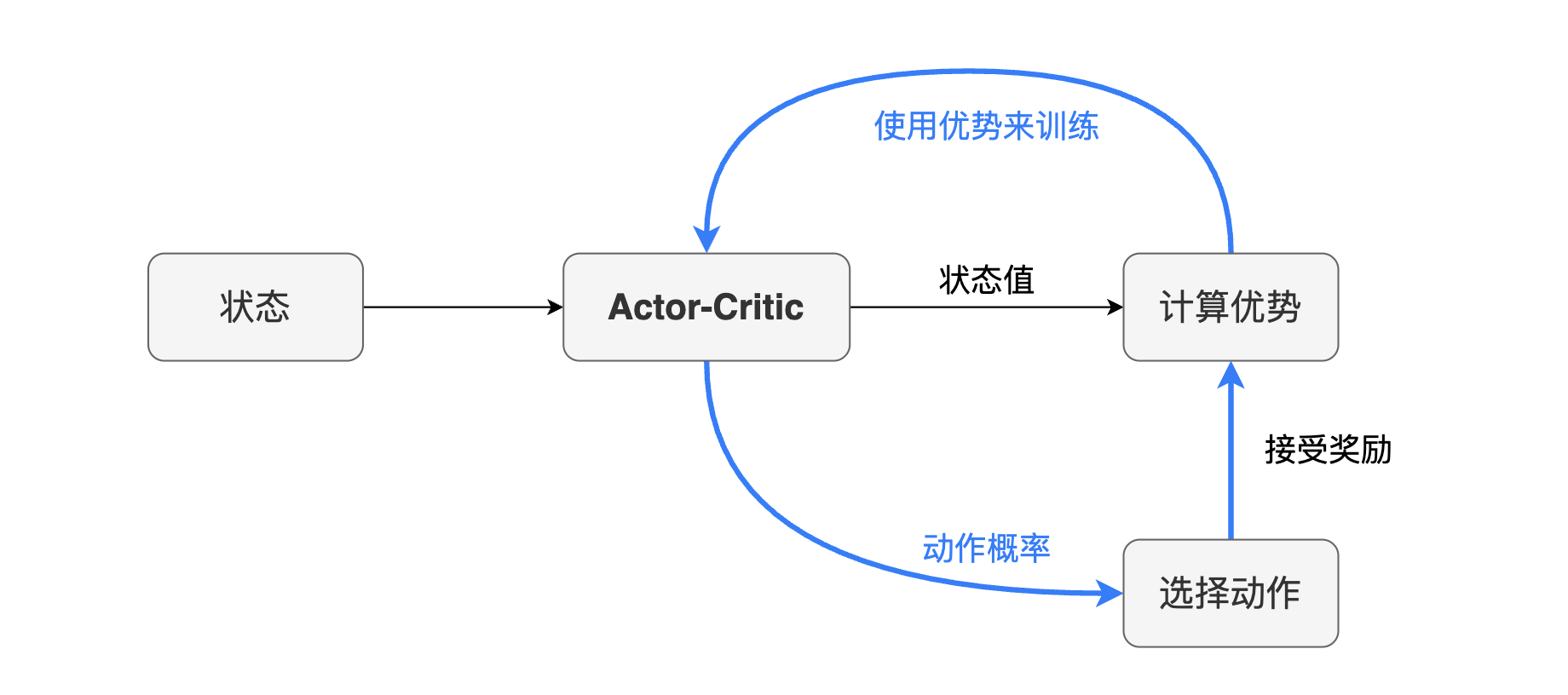
由于策略网络主要用来选择动作,并通过动作优势来加强,而价值网络则主要用来预测状态的价值,那将两者合二为一之后,我们便希望网络可以同时输出这两个值。从动作优势的公式 \(\text{Q}_\text{advantage}(s, a) = \text{Q}_\text{action}(s, a) - \text{Q}_\text{state}(s)\) 来看,它需要两个值,这两个值正是模型预测出来的两个值,然后最后使用动作优势的误差进行训练。
多头模型
多头模型是指一个模型有多个输出。我们之前提到的模型基本上都是一个输入一个输出,输入输出都是张量。但其实认真想一下会发现,模型本身只是一个函数,模型内的层只是一系列的函数嵌套,每个函数有其自身的参数。如果我们希望一个模型有多个输出,那实际上只需要在中间某一层的输出之后分成两条路,再分别经过多层输出即可。
从上面的 Actor-Critic 方法里可以看到,如果我们希望统一训练 Actor-Critic 模型,我们要求它有双头输出,也就是同时输出状态价值以及动作分布,其流程图如下所示。
graph LR
S[状态] --> AC[Actor-Critic模型]
AC --> SValue[状态价值]
AC --> Actions[动作分布]
下面的示意图稍微将这个流程图扩展为模型架构。
graph LR
S[状态] --> L1[Layer 1]
subgraph ac[Actor-Critic模型]
L1[公共层] --> dots[...]
dots --> LN[公共层]
LN --> A1[Actor层]
A1 --> dots1[...]
dots1 --> A2[Actor层]
LN --> C1[Critic层]
C1 --> dots2[...]
dots2 --> C2[Critic层]
end
A2 --> Actions[动作分布]
C2 --> SV[状态价值]
模型训练
在强化学习模型训练里有一个很重要的概念,称为在线学习(Online Training)与离线学习(Offline Training)。
从上面的训练主流程来看,注意到蓝色高亮部分是一个闭环,在强化学习的场景里,每一次尝试都是多步的,每一步都能获得奖励,通过这些奖励对某些动作进行强化。这意味着,在做下一次动作选择之前,动作选择的分布就已经被上一个动作所获得的奖励强化了。这种在训练的同时使用模型,在使用中训练模型的方式,称为在线学习。而离线学习可以简单地以分类学习来理解,分类学习里都是明确区分训练与使用环节的。
在线学习一个最大的问题就是“踩着空气上升”,因为无法确保学习过程中学到的经验就是有效的,进一步基于这些经验进行决策,可能会向着错误的方向越走越远,而学习本质是参数更新,为了解决这个问题,一些模型训练的变种会采取一种通用的策略,那便是“在适当的时候更新参数”。这个“适当的时候”催生出很多优化方法。比如:
- 使用两个网络,一个网络进行决策,一个网络进行学习,然后周期性将学习网络同步至决策网络。
- 延时更新参数,在学到一定程度,再进行参数更新。
- 使用多个网络,同步进行学习,然后将多个网络进行均值处理,这种方式称为分布式学习。
下面是整个训练的示意图,其中的 Actor-Critic 模型使用的架构就是上面的双头模型架构,每个循环里同时计算状态值以及动作概率,从而计算动作优势,用动作优势对 Actor-Critic 模型进行训练。
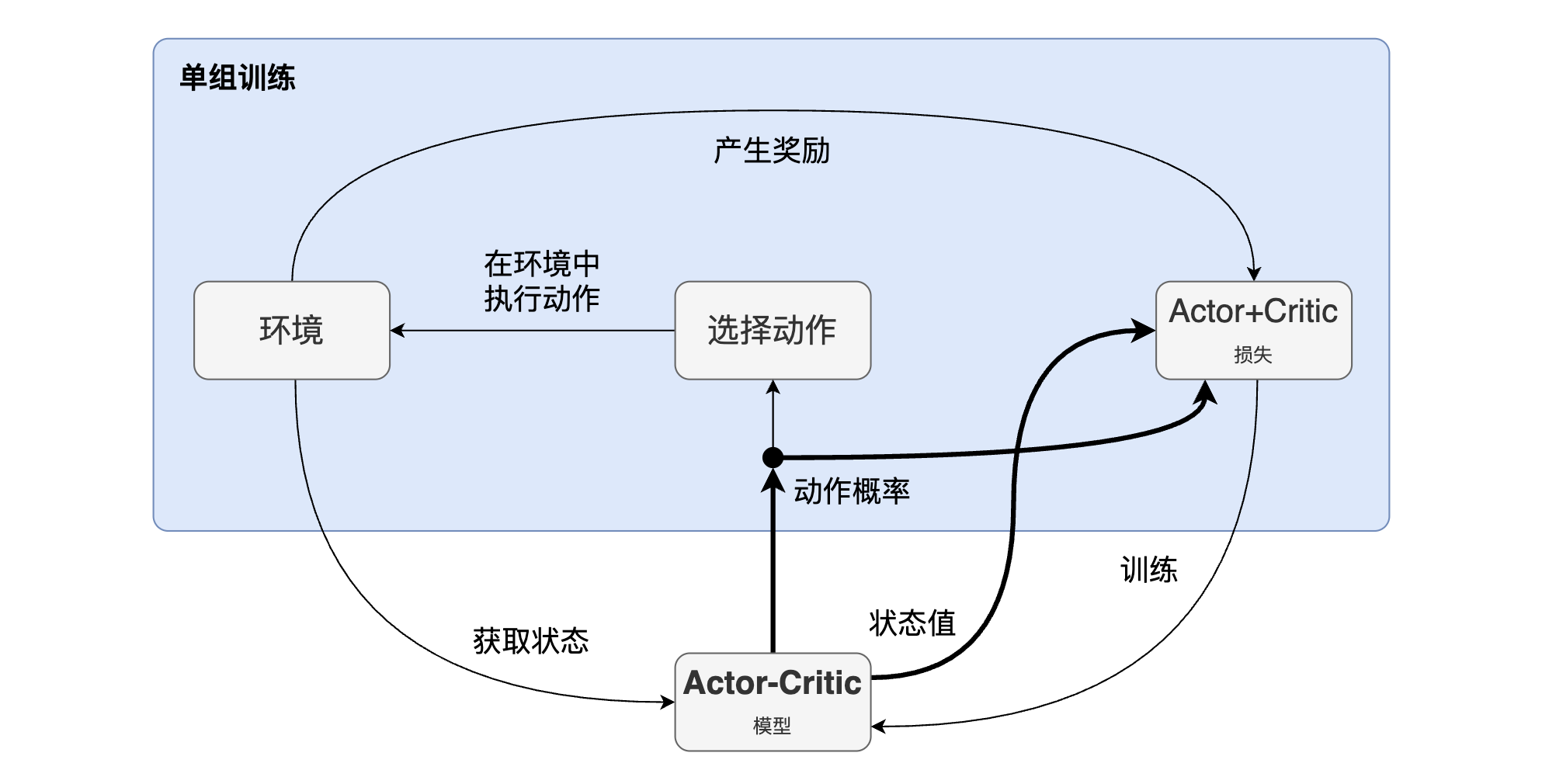
上面的流程图展示的是延时更新参数的方式,“单组训练”既可以是小批量经验学习,也可以是一次尝试里的所有经验。
场景学习与应用
强化学习相关知识比较难直接应用在生产,因为现实环境比较复杂,需要有足够的建模知识,训练技巧,甚至硬件设施才有可能真正使用强化学习解决问题。为了解决这种学习与生产的巨大落差感,业界也有不少工具方便与帮助学习的。
Gymnasium 是其中一个很优秀的例子,这个工具对强化学习的常见环境进行了封装,提供环境相关的接口以及可视化方法,使用者只需要自己实现强化学习智能体即可。
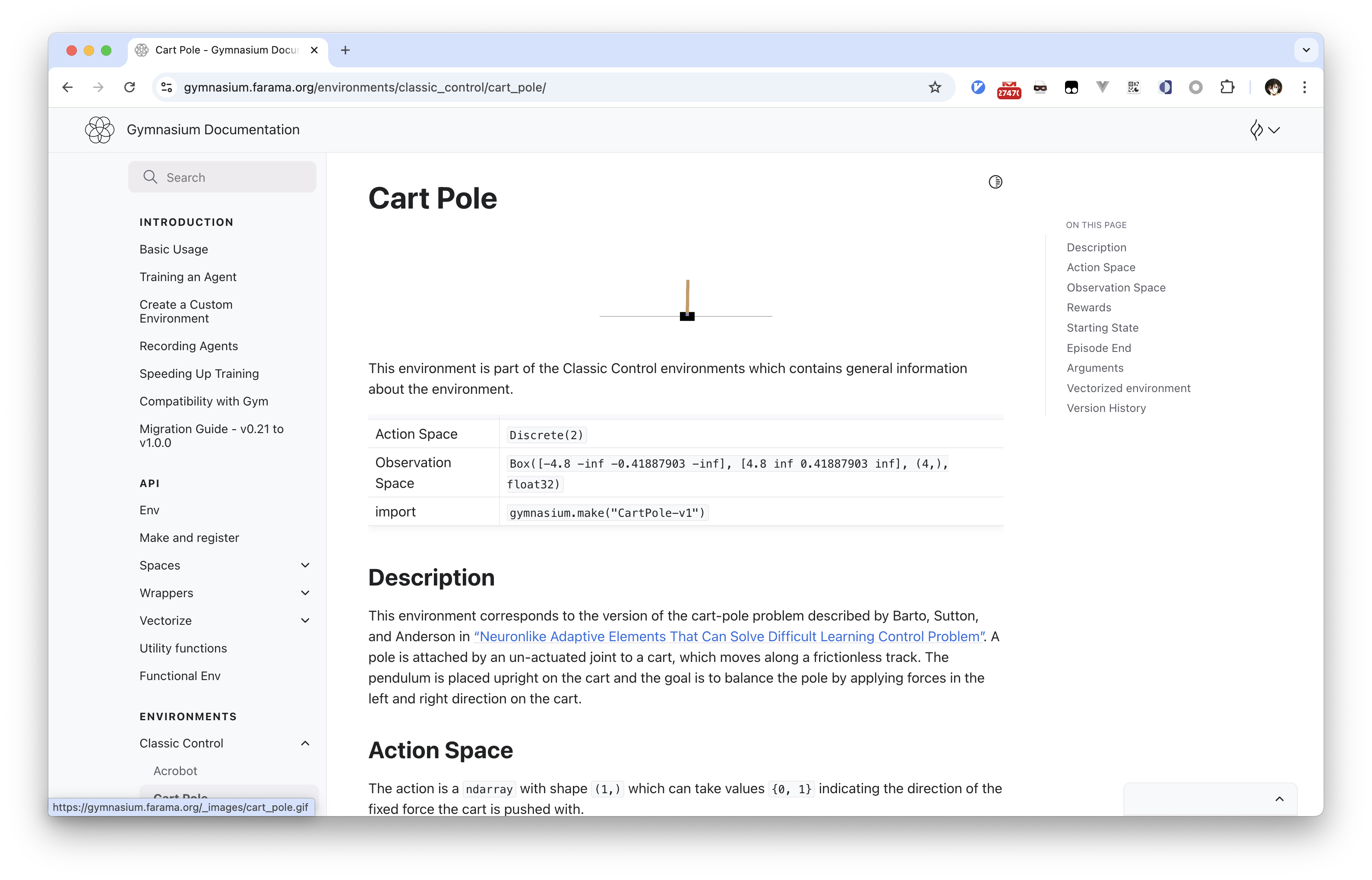
上面是 Cart-Pole 例子的文档截图,在这个简单的环境可以看到,Gymnasium
将环境抽象为 ActionSpace 以及
ObservationSpace。
ActionSpace:我们一直提到的动作空间,也就是智能体可以选择什么动作,在 Cart-Pole 环境中,智能体只能向左或者向右,所以ActionSpace是一个两个元素的数组。ObservationSpace:观察空间实际上是环境的状态,也就是我们能从环境中获取到的对状态的描述向量。在 Cart-Pole 例子里,环境是车子和棍子,车子有位置以及速度两个状态,棍子有竖直角度以及旋转角速度两个状态,所以在这个例子里,ObservationSpace就是一个四个元素的数组。
通过 Gymnasium 可以尝试强化学习算法在不同环境中的效果,也可以在同一个环境中对比不同强化学习算法的效果,为强化学习提供了非常好的帮助与支持。
小结
- 连续性:在连续性环境中,动作以及状态都是连续的,需要将动作转换为动作分布,并且使用动作优势进行训练,因为单纯靠试验结果作为奖励会较弱。
- 动作优势:动作价值与状态价值之差。
- Actor-Critic方法:基于动作优势进行学习,Actor网络预测动作分布,Critic网络预测状态价值。
- Actor-Critic训练:使用多头网络同时预测策略(动作分布)与状态价值,结合各种延时学习的策略提高稳定性与准确性。
- Gymnasium:一个强化学习的工具,提供一些基础环境的封装与可视化,方便强化学习的实验。