AI学习时间 12 - 深度Q学习
#强化学习 #灾难性遗忘
#状态叠加编码 #深度Q学习
复习
- Q 函数:价值函数,计算状态或在在某个状态下的执行某个动作的价值。
%%{
init: {
'themeVariables': {
'edgeLabelBackground': '#fff',
'edgeLabelColor': '#333',
'edgeLabelFontSize': '14px'
}
}
}%%
graph LR
S[状态s] --> Q["Q(s, a)"]
A[动作a] --> Q["Q(s, a)"]
Q --->|计算出一个值| V["比如 0.9"]
- 改进的 Q 函数:通过状态计算出动作的 Q 值分布。
%%{
init: {
'themeVariables': {
'edgeLabelBackground': '#fff',
'edgeLabelColor': '#333',
'edgeLabelFontSize': '14px'
}
}
}%%
graph LR
S[状态s] --> Q["Q'(s)"]
Q --->|计算出一个分布| V["0.1
0.9
-0.2
-0.7
"]
- Q 学习:一种强化学习方法。在学习过程中,使用 Q 函数辅助决策,通过未来收益不断调整 Q 值,最终形成一个最优策略。
\[ \overbrace{Q(S_t, A_t)}^\text{更新的 Q 值} = \overbrace{Q(S_t, A_t)}^\text{当前的 Q 值} + \alpha[ \underbrace{R_{t+1}}_\text{奖励} + \gamma \underbrace{\max Q(S_{t+1}, a)}_\text{所有动作里的最大 Q 值} - Q(S_t, A_t) ] \]
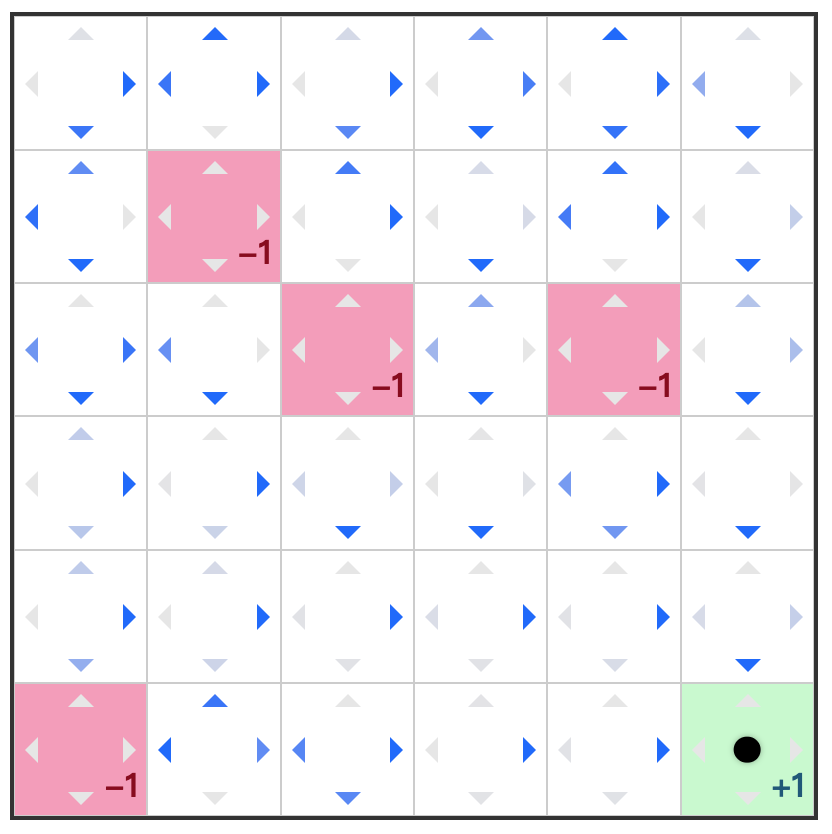
GridWorld 的启示
在我们上次的例子里,GridWorld 是如下的一个格子世界。格子有三种类型,带惩罚的红色格子,带奖励的绿色格子,以及可以自由行走的普通白色格子。
上次的问题是,训练出一个智能体,希望这个智能体在这个 GridWorld 里探索的时候能够尽可能拿到更好的奖励。再次回忆我们上次用到的方法。
- 让智能体随便走
- 当某一条路径走到终点(假如是奖励格子)
- 我们反向改变智能体在每一个路径格子的动作权重
通过这种方式,我们最终得到的策略可能是如下的样子。
这里需要留意的是,我们训练这个智能体的时候,使用的是一个固定的 GridWorld,也就是奖励点以及惩罚点每次都是固定的。这意味着,这个智能体只学到了“这个” GridWorld。要是我们换一个 GridWorld,奖励点和惩罚点的位置都发生变化之后,这个策略明显是行不通的,目前尝试去避免惩罚点的决策,很有可能在新的 GridWorld 里是走向惩罚点的。
换个角度说,智能体此时学到的是“走到 [1, 1]
这个格子不太好”(在这个例子里 [1, 1]
是惩罚点)。并不是学到“走到惩罚点不太好”。这个区别非常关键,考虑一个新的问题
训练一个智能体,使其能尽量远离惩罚点,并到达奖励点获得奖励。
这个新问题意味着,当我们把智能体放到任意随机的 GridWorld 的时候,我们都希望它能够避开惩罚点。
灾难性遗忘
灾难性遗忘(Catastrophic Forgetting)在这类问题里非常普遍,我们先看看这个问题。在上面的新问题中,我们喂给智能体的是各种随机 GridWorld,下面随便给出两个例子。
上面两个 GridWorld 的奖励点与惩罚点是刚好相反的,如果智能体在左边的
GridWorld 里学到,在 [3, 2]
这个位置应该往右走,那么它带着这个策略走右边的
GridWorld,将会直接走到惩罚点。此时有人可能会问,当训练到右边的
GridWorld
的时候,智能体会不会就修正自己的权重呢?但你要想的是,按照之前提到的 Q
值更新方法,会导致智能体把 Q
值修正。那么如果再给智能体左边的图,它就要陷入这种死循环里了。
位置编码
之前一直没有提到的一个细节是,我们在训练智能体的时候,GridWorld 是如何被编码的,也就是强化学习的环境,究竟是如何编码的?
考虑到改进后的 Q 函数具有以下的形式:
%%{
init: {
'themeVariables': {
'edgeLabelBackground': '#fff',
'edgeLabelColor': '#333',
'edgeLabelFontSize': '14px'
}
}
}%%
graph LR
S[状态s] --> Q["Q'(s)"]
Q --->|计算出一个分布| V["0.1
0.9
-0.2
-0.7
"]
最容易想到的一种编码方式就是坐标编码,这种编码方式表明智能体当前的位置。比如
s = [2, 3] 表明智能体当前在 [2, 3]
这个位置。这种编码方式也是非常直观的,在这种编码方式下,执行动作并且改变状态这个过程非常直观。比如这种方式可以通过下面的方式实现。
const up = (s: State): State => { |
这种编码方式虽然很简单很直观,但是最致命的弱点是智能体没有学到世界的所有信息,它只知道在“当前这个世界下”,在某个位置是否安全,或者在这个位置向左走,或者向右走会大概有什么结果。它并不清楚世界里,有奖励点,有惩罚点。但我们的目标是希望智能体能够辨别奖励点,惩罚点。只有它能够辨别,才能在另一个随机世界里也能做出正确的决策,避开惩罚点,到达奖励点。
状态叠加编码
为了解决这个问题,我们需要将尽量多的环境信息编码到状态。这个涉及到训练设计的问题,不过一种很常规,并且很容易理解的办法是将各种信息分类分层,然后再叠加在一起。
比如在这个简单例子的 GridWorld 里,位置信息有三种
- 惩罚点位置信息
- 奖励点位置信息
- 智能体位置信息
也就是对于最初是的 GridWorld,我们拆分出了三层信息。
这种信息转化为代码,天然是一个非常整齐的张量格式。
const state = [ |
注意到,这种实现其实也并不困难,在环境中会有 getState
方法,通过这个方法可以获取当前环境的状态。
class Env { |
其中的 getAgentState
方法用于获取智能体当前位置,然后转化为这种张量格式,它所处位置的数组元素为
1,数组其余位置都是
0。这种编码方式可以让智能体在学习的过程中,“学会”这些信息之间的关联。
经验回放
回想之前讨论的训练过程,为了让学习过程更快收敛,学习的结果更为准确,其中一个技巧是小批量学习。
经验回放其实与小批量的思路是一致的,就是一次迭代过程中,传入批量的经验数据。有了上面的编码之后,在一次迭代中
- 获取当前状态
state - 选择动作
action - 执行动作
- 环境更新状态
nextState,同时反馈(奖励)reward - 一般环境更新状态的同时会给出此次探索是否终止
done
这样一条经验数据为
[state, action, nextState, reward, done]。当智能体在环境中自由探索,并且没有终结之前,就能持续获得经验数据。这样在一次探索中,最后获得一组经验数据。
// 一条经验数据 |
经验回放在训练过程中起到收集经验数据,然后组织为批量数据作为训练的输入的作用。
%%{
init: {
'themeVariables': {
'edgeLabelBackground': '#fff',
'edgeLabelColor': '#333',
'edgeLabelFontSize': '14px'
}
}
}%%
graph LR
Env[环境] --> |迭代与变化| Exp[经验收集器]
Exp --> |经验数据| Agent[智能体]
Agent --->|选择与执行| Action[动作]
Action ---> |作用于| Env
Action ---> Exp
深度 Q 学习
上次我们说到的 Q 学习,可以直接迁移到深度网络中。Q 学习的核心在于 Q 值的更新,而上次使用的是确定性的 Q 值更新方法,也就是
\[ \overbrace{Q(S_t, A_t)}^\text{更新的 Q 值} = \overbrace{Q(S_t, A_t)}^\text{当前的 Q 值} + \alpha[ \underbrace{R_{t+1}}_\text{奖励} + \gamma \underbrace{\max Q(S_{t+1}, a)}_\text{所有动作里的最大 Q 值} - Q(S_t, A_t) ] \]
在代码中我们也是用确定性方法进行实现。
const updateQValue = (state, action, reward, nextState) => { |
但经过这段时间的学习,我们应该慢慢能感受到非确定性方法所带来的魅力。在解决复杂问题的时候,非确定性方法可以不显式指定规则,通过学习的方式将“规则”内化到智能体内。所以深度
Q 学习,实际上是将 Q 值的计算交给深度神经网络进行计算,原来的
updateQValue 方法是用来存储一个巨大的 Q
值表,但现在通过神经网络计算的话,这个 Q
值表,实际上变成了网络内部的参数表示了。
结合经验回放,下面是整个深度 Q 学习的流程图。
%%{
init: {
'themeVariables': {
'edgeLabelBackground': '#fff',
'edgeLabelColor': '#333',
'edgeLabelFontSize': '14px'
}
}
}%%
graph TD
Env["环境状态$S_{t+1}$"] --> |"产生经验$[s, a, s_{t+1}, r_{t+1}]$"| Exp[经验收集器]
Exp --> |经验数据| Q[深度Q网络]
Q --->|预测Q值| Action["$\epsilon$-贪心策略"]
Action ---> |执行动作$a$| Env
Env ---> |"奖励$R_{t+1}$"| Env
下面是深度 Q 学习的循环伪代码,可以与之前的进行对比。
const step = () => { |
小结
- 为了让智能体“真正学会”奖励点与惩罚点,需要
- 通过叠加状态的编码方式传递环境信息
- 通过经验重放来避免灾难性遗忘
- Q 学习 使用”巨大的 Q 值表“来维护与更新 Q 值
- 深度 Q 学习 是使用深度网络来预测 Q 值