Of the many spatial partitioning methods available, the BSP tree is
the most versatile. It can perform the same tasks as the k-d
tree, the quadtree, or the octree, but not vice versa.
BSP Trees
A binary space-partitioning tree (or BSP tree) is a binary tree
structure that recursively partitions space into pairs of subspaces
with respect to dividing planes of arbitrary position and
orientation. If the space being partitioned is n-dimensional,
the dividing planes are (n-1)-dimensional hyperplanes.
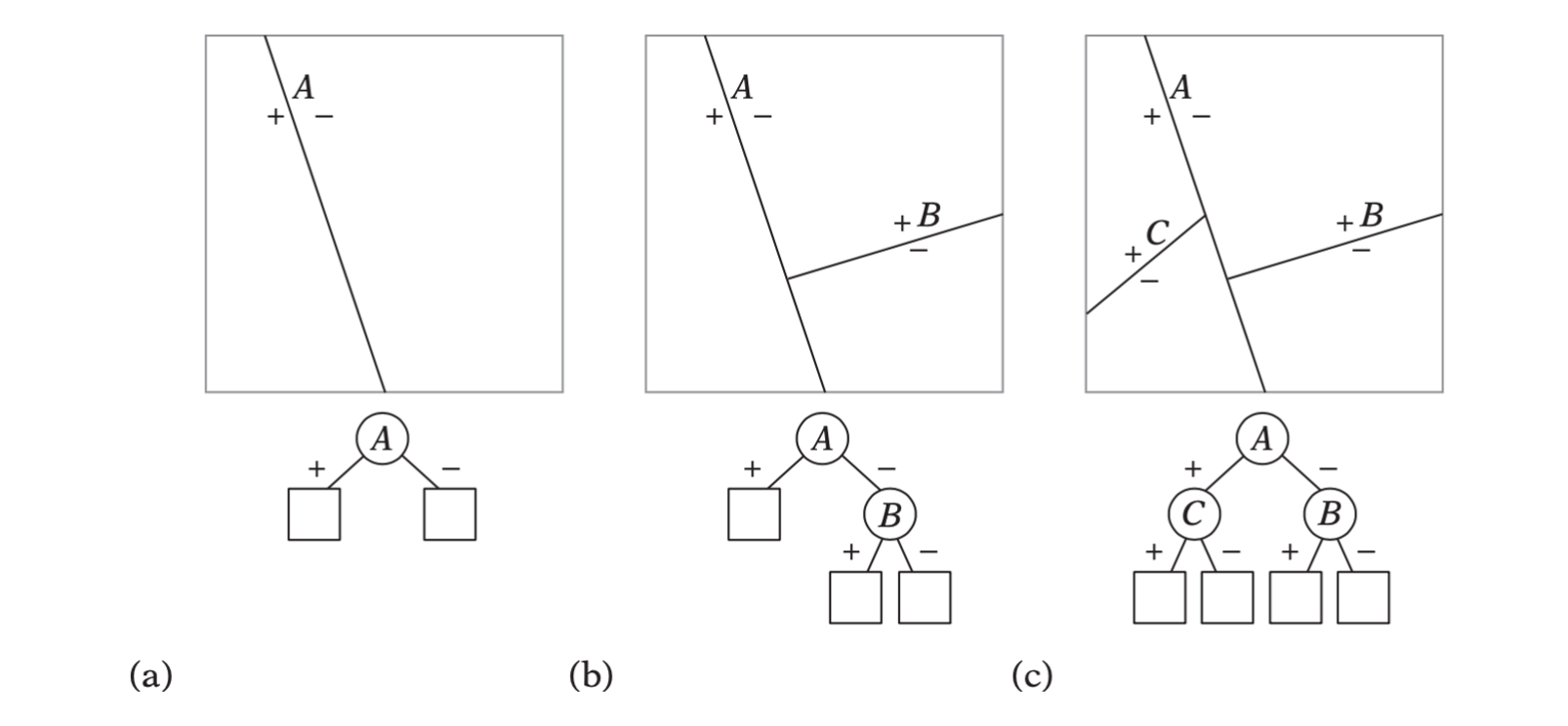
The successive division of a square into
four convex subspaces and the cor- responding BSP tree. (a) The initial
split. (b) The first second-level split. (c) The second second-level
split.
The successive division of a square into four convex subspaces and
the cor- responding BSP tree. (a) The initial split. (b) The first
second-level split. (c) The second second-level split.
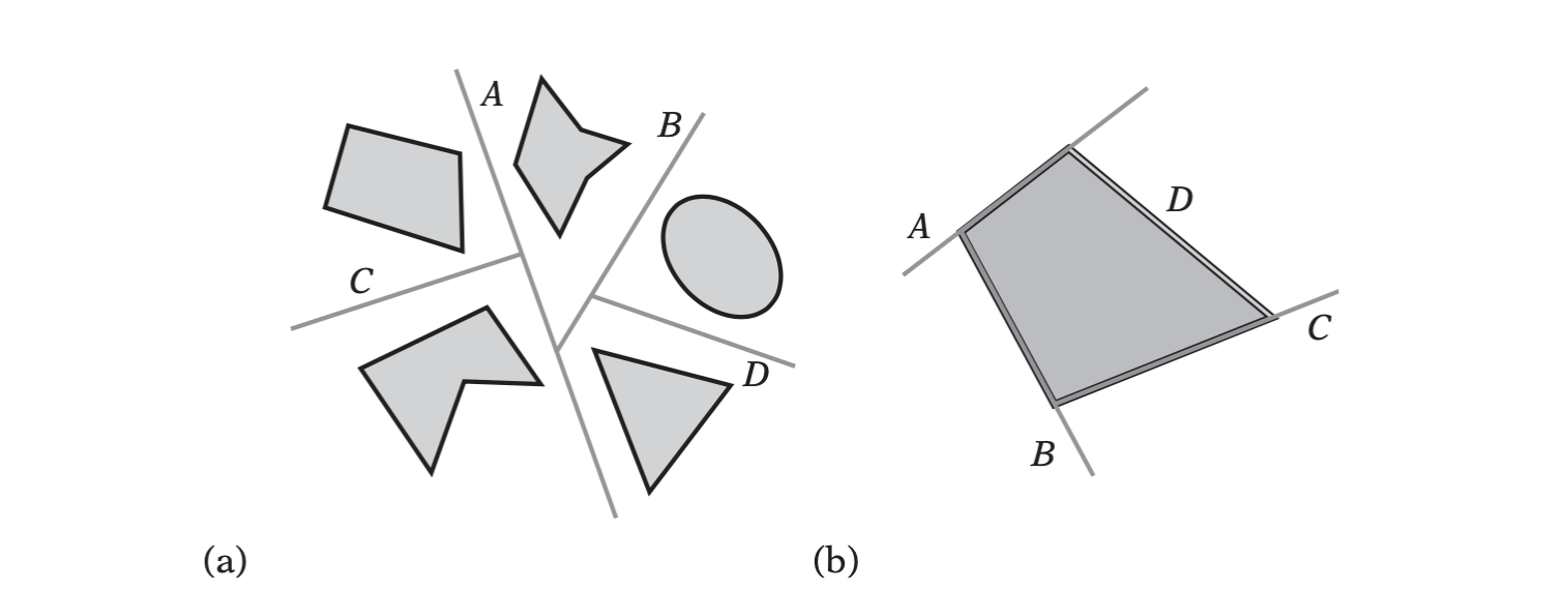
The recursive division of space in half
can be used as (a) a spatial partitioning over a number of objects. It
can also be used as (b) a volume or boundary representation of an
object.
The recursive division of space in half can be used as (a) a spatial
partitioning over a number of objects. It can also be used as (b) a
volume or boundary representation of an object.
Usage of BSP Trees:
Solve the hidden-surface problem. The BSP built in preprocessing
phase can be traversed at runtime to give the correct (back-to-front or
front-to-back) sorting order of objects or individual polygons from an
arbitrary viewpoint.
Ray tracing.
Constructive solid geometry (CSG).
Robot motion.
Path planning.
Spatial partitioning.
Volume representation.
Types of BSP Trees
Node-storing BSP Trees
A node-storing (or node-based) BSP tree is autopartitioning, thus
selecting supporting planes of faces from the geometry as the dividing
planes used during construction.
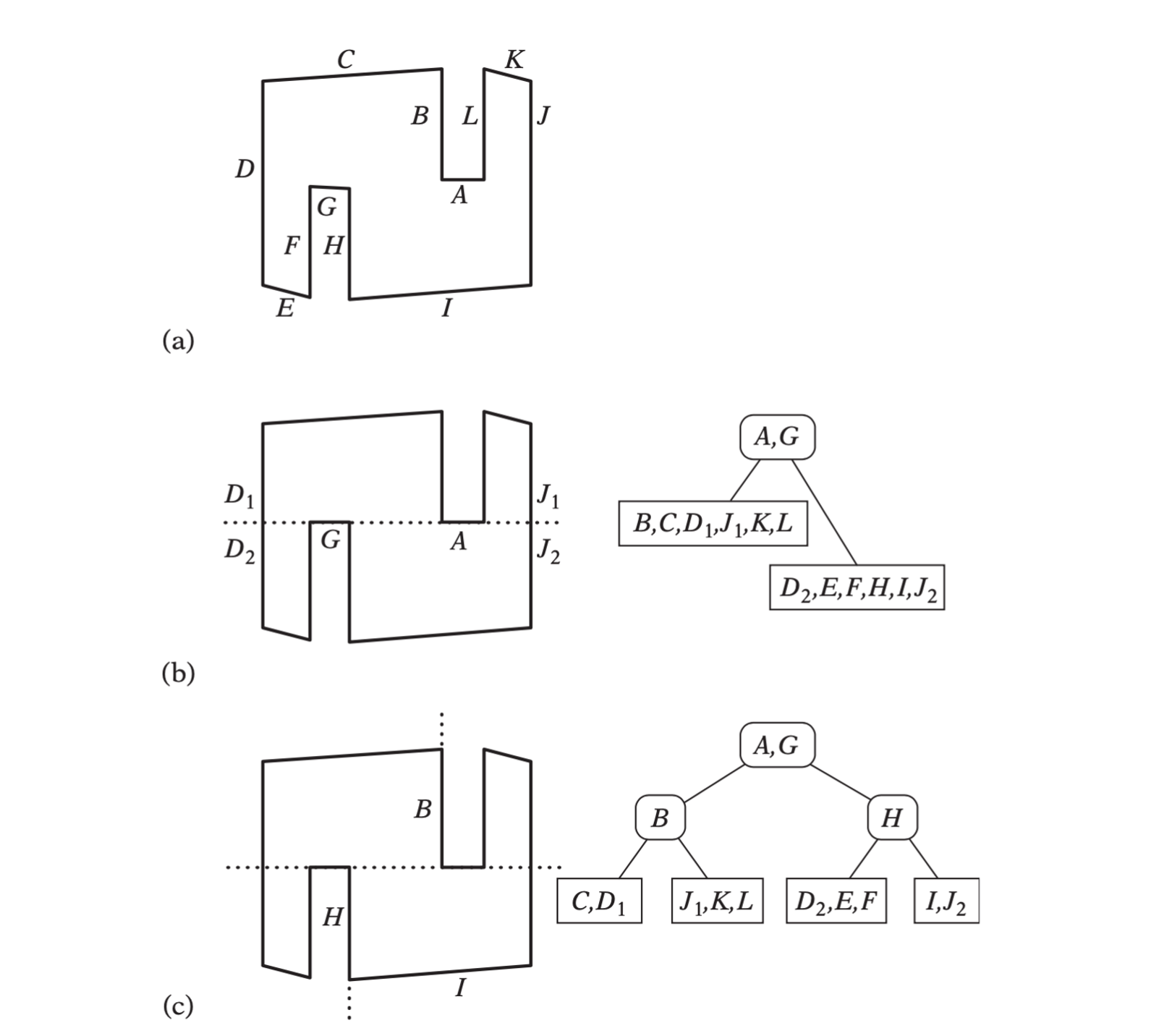
(a) The original 12-polygon input
geometry. (b)The initial dividing plane is selected to pass through face
A (and face G). (c) For the next ply of the tree
dividing planes are selected to pass through faces B and
H.
The original 12-polygon input geometry. (b)The initial dividing
plane is selected to pass through face A (and face G).
(c) For the next ply of the tree dividing planes are selected to pass
through faces B and H.
Leaf-storing BSP Trees
Leaf-storing BSP tree refers to any BSP tree in which geometry is
stored in the leaves of the tree rather than in the internal nodes.
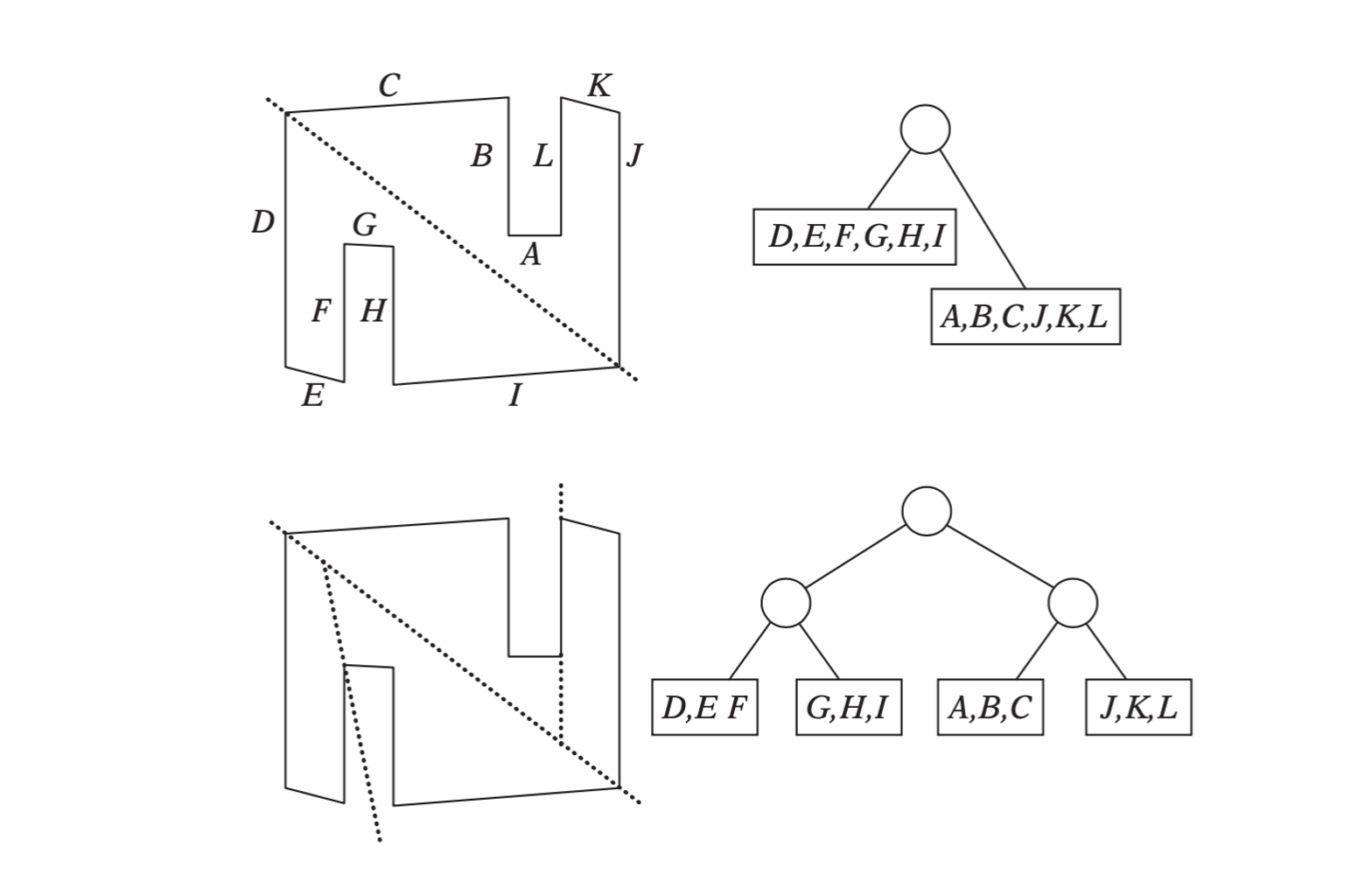
First steps of the construction of a
leaf-storing BSP tree, using the same geometry as before.
First steps of the construction of a leaf-storing BSP tree, using the
same geometry as before.
Solid-leaf BSP Trees
Solid-leaf BSP trees are built to represent the solid volume occupied
by the input geometry. That is, dividing planes are ultimately selected
to separate the solid volume from the exterior of the object.
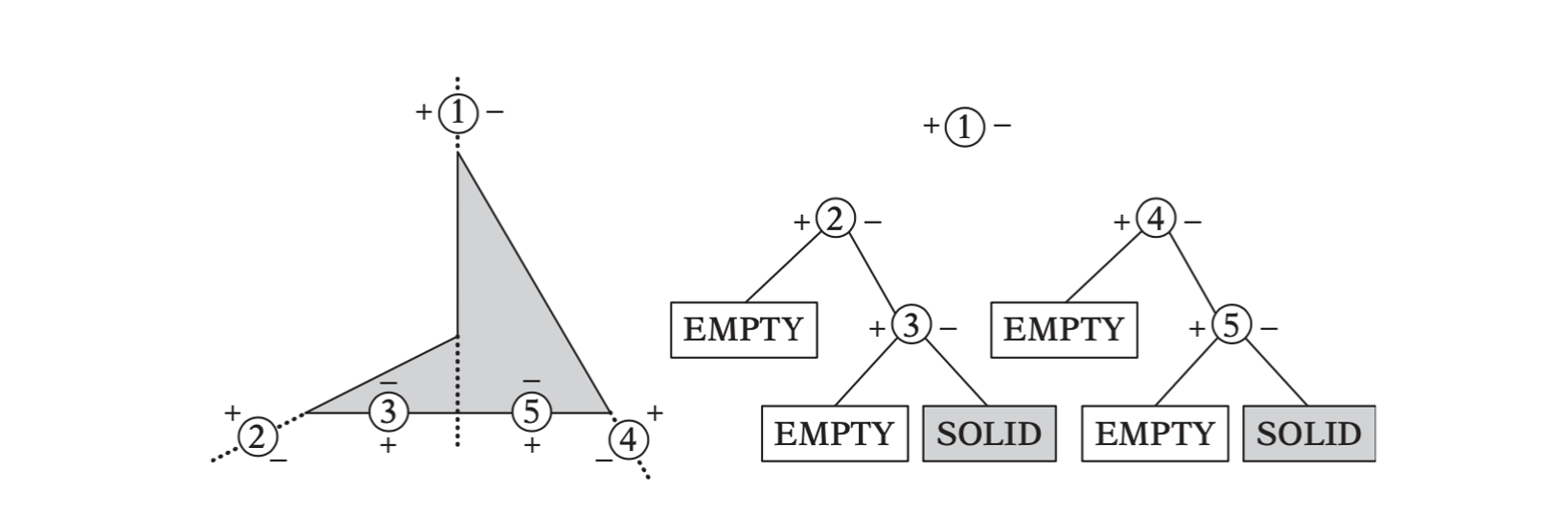
A solid figure cut by a number of
dividing planes and the resulting solid-leaf BSP tree.
A solid figure cut by a number of dividing planes and the resulting
solid-leaf BSP tree.
Building the BSP Tree
Building a BSP tree involves three steps.
Selection of a partitioning plane.
Partitioning of the input geometry into two sets with respect to the
plane; the geometry in front of the plane and the geometry behind it.
Geometry that straddles the plane is split to the plane before
partitioning.
The forming of a tree by connecting with a new tree node the two
subtrees created by recursively calling the construction algorithm with
the two partitioned sets obtained in the previous step.
// Constructs BSP tree from an input vector of polygons. Pass ‘depth’ as 0 on entry BSPNode *BuildBSPTree(std::vector<Polygon *> &polygons, int depth){ // Return NULL tree if there are no polygons if (polygons.empty()) returnNULL;
// Get number of polygons in the input vector int numPolygons = polygons.size();
// If criterion for a leaf is matched, create a leaf node from remaining polygons if (depth >= MAX_DEPTH || numPolygons <= MIN_LEAF_SIZE) || ...etc...) returnnewBSPNode(polygons);
// Select best possible partitioning plane based on the input geometry Plane splitPlane = **PickSplittingPlane**(polygons);
std::vector<Polygon *> frontList, backList;
// Test each polygon against the dividing plane, adding them // to the front list, back list, or both, as appropriate for (int i = 0; i < numPolygons; i++) { Polygon *poly = polygons[i], *frontPart, *backPart; switch (**ClassifyPolygonToPlane**(poly, splitPlane)) { case COPLANAR_WITH_PLANE: // What’s done in this case depends on what type of tree is being // built. For a node-storing tree, the polygon is stored inside // the node at this level (along with all other polygons coplanar // with the plane). Here, for a leaf-storing tree, coplanar polygons // are sent to either side of the plane. In this case, to the front // side, by falling through to the next case case IN_FRONT_OF_PLANE: frontList.push_back(poly); break; case BEHIND_PLANE: backList.push_back(poly); break; case STRADDLING_PLANE: // Split polygon to plane and send a part to each side of the plane **SplitPolygon**(*poly, splitPlane, &frontPart, &backPart); frontList.push_back(frontPart); backList.push_back(backPart); break; } } // Recursively build child subtrees and return new tree root combining them BSPNode *frontTree = BuildBSPTree(frontList, depth + 1); BSPNode *backTree = BuildBSPTree(backList, depth + 1); returnnewBSPNode(frontTree, backTree); }
For a node-storing tree and a solid-leaf tree, the recursive
construction proceeds until the set of remaining input polygons becomes
empty. The construction of a leaf-storing BSP tree is typically stopped
when:
The leaf contains less than some preset number of polygons.
A fixed cutoff depth has been reached.
A good dividing plane cannot be found.
Selecting Dividing Planes
Autopartitioning by restricting the dividing planes as the supporting
planes of the geometry may not be an optimal solution.
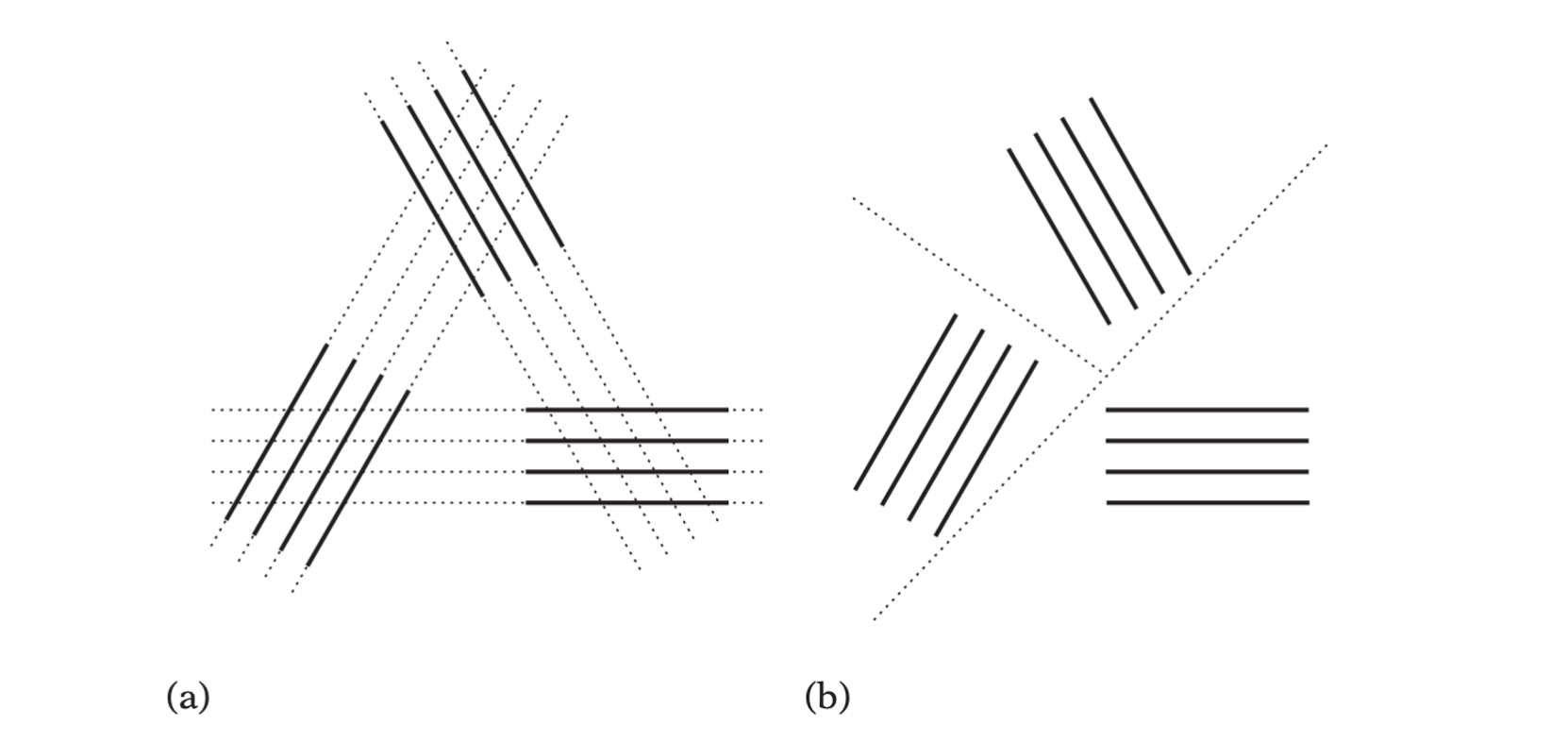
(a) A configuration of 12 faces wherein
all possible auto-partitioned dividing planes end up splitting four
faces. (b) Using arbitrary splits can allow the configuration to be
partitioned in such a way that the problem disappears or is
reduced.
Another problem of using just auto-partitioning is that for convex
shapes, the resulting tree will in some sense be maximally unbalanced,
with a depth equal to the number of faces in the sphere.
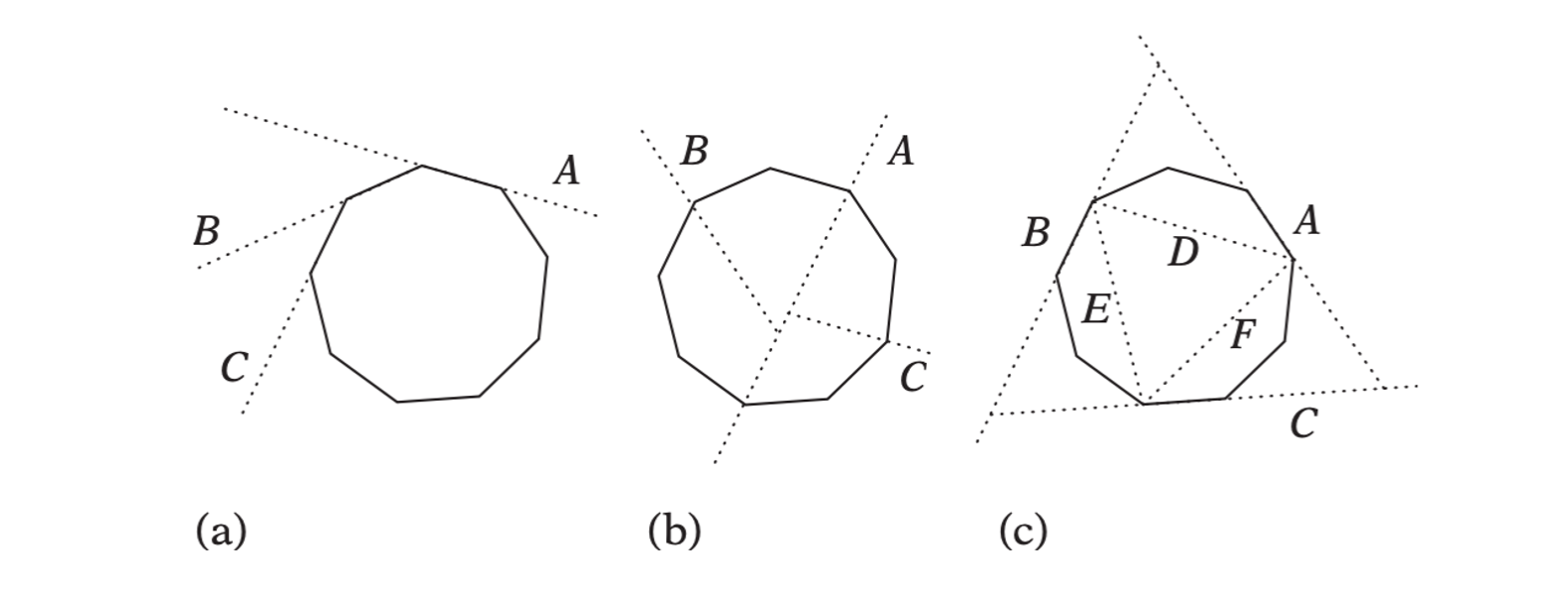
(a)An auto partitioned BSP tree for a
polygonal sphere has worst-case O(n) height. (b)
Allowing arbitrary cuts across the sphere, tree height is reduced to
O(log n). (c) Naylor’s hybrid approach of alternating
auto-partitioning and general cuts also allows a boundary representation
of the sphere to have O(log n) height, additionally
providing early outs.
Evaluating Dividing Planes
Two strategies particularly relevant to collision detection are to
pick planes so as to minimize splitting of geometry and to attempt to
balance the geometry equally on both sides of the splitting plane.
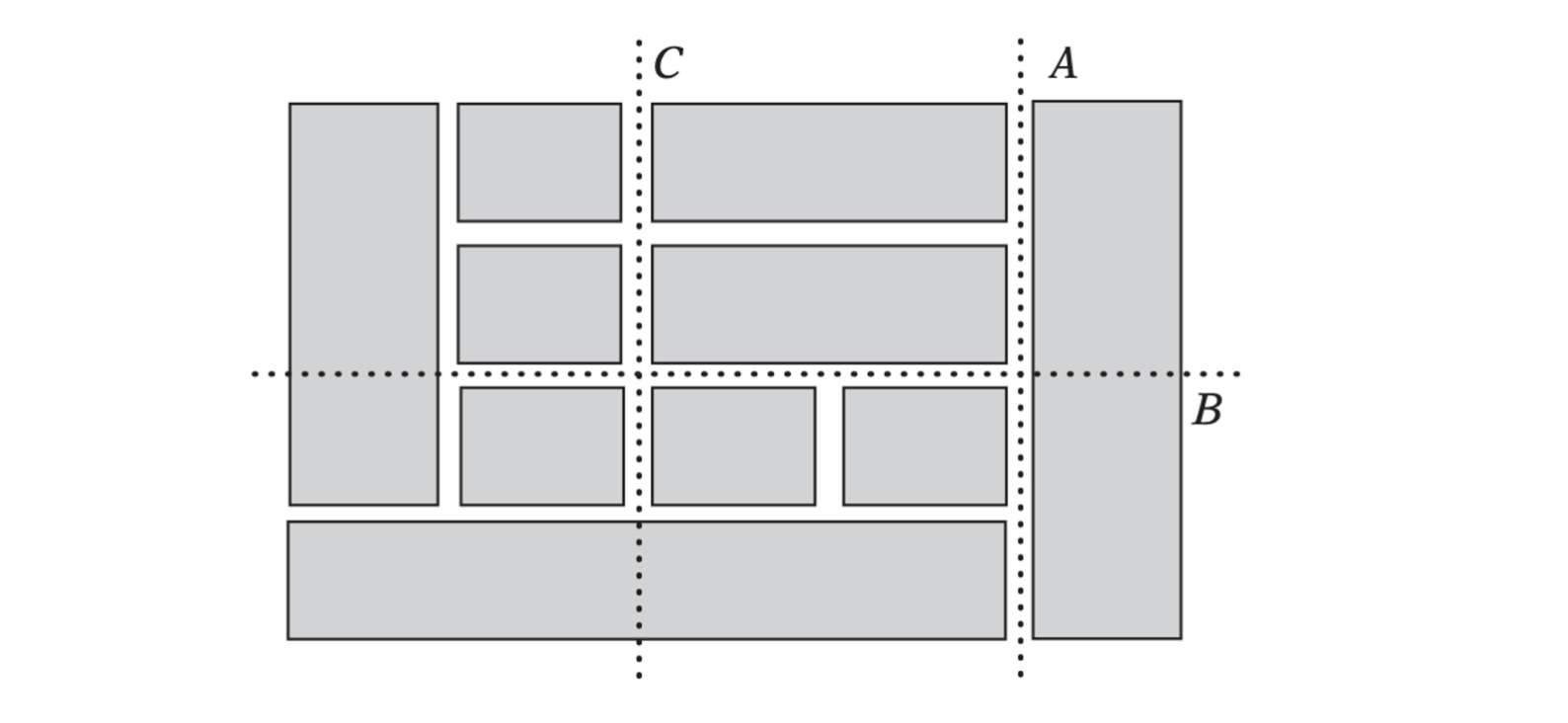
Part of a city grid split to minimize
straddling polygons (A), balance the number of polygons on
either side of the dividing plane (B), and compromise between
minimizing straddling and balancing of polygons (C
).
// Given a vector of polygons, attempts to compute a good splitting plane Plane PickSplittingPlane(std::vector<Polygon *> &polygons){ // Blend factor for optimizing for balance or splits (should be tweaked) constfloat K = 0.8f; // Variables for tracking best splitting plane seen so far Plane bestPlane; float bestScore = FLT_MAX;
// Try the plane of each polygon as a dividing plane for (int i = 0; i < polygons.size(); i++) { int numInFront = 0, numBehind = 0, numStraddling = 0; Plane plane = GetPlaneFromPolygon(polygons[i]); // Test against all other polygons for (int j = 0; j < polygons.size(); j++) { // Ignore testing against self if (i == j) continue; // Keep standing count of the various poly-plane relationships switch (ClassifyPolygonToPlane(polygons[j], plane)) { case POLYGON_COPLANAR_WITH_PLANE: /* Coplanar polygons treated as being in front of plane */ case POLYGON_IN_FRONT_OF_PLANE: numInFront++; break; case POLYGON_BEHIND_PLANE: numBehind++; break; case POLYGON_STRADDLING_PLANE: numStraddling++; break; } } // Compute score as a weighted combination (based on K, with K in range // 0..1) between balance and splits (lower score is better) float score = K * numStraddling + (1.0f - K) * Abs(numInFront - numBehind); if (score < bestScore) { bestScore = score; bestPlane = plane; } } return bestPlane; }
Classifying
Polygons with Respect to a Plane
After a dividing plane has been selected all polygons must be
partitioned with respect to this plane into one of the following four
categories.
Polygons that lie in front of the dividing plane.
Polygons that lie behind the dividing plane.
Polygons straddling the dividing plane.
Polygons coincident with the dividing plane.
// Classify point p to a plane thickened by a given thickness epsilon intClassifyPointToPlane(Point p, Plane plane){ // Compute signed distance of point from plane float dist = Dot(plane.n, p) - plane.d;
// Classify p based on the signed distance if (dist > PLANE_THICKNESS_EPSILON) return POINT_IN_FRONT_OF_PLANE; if (dist < -PLANE_THICKNESS_EPSILON) return POINT_BEHIND_PLANE; return POINT_ON_PLANE; }
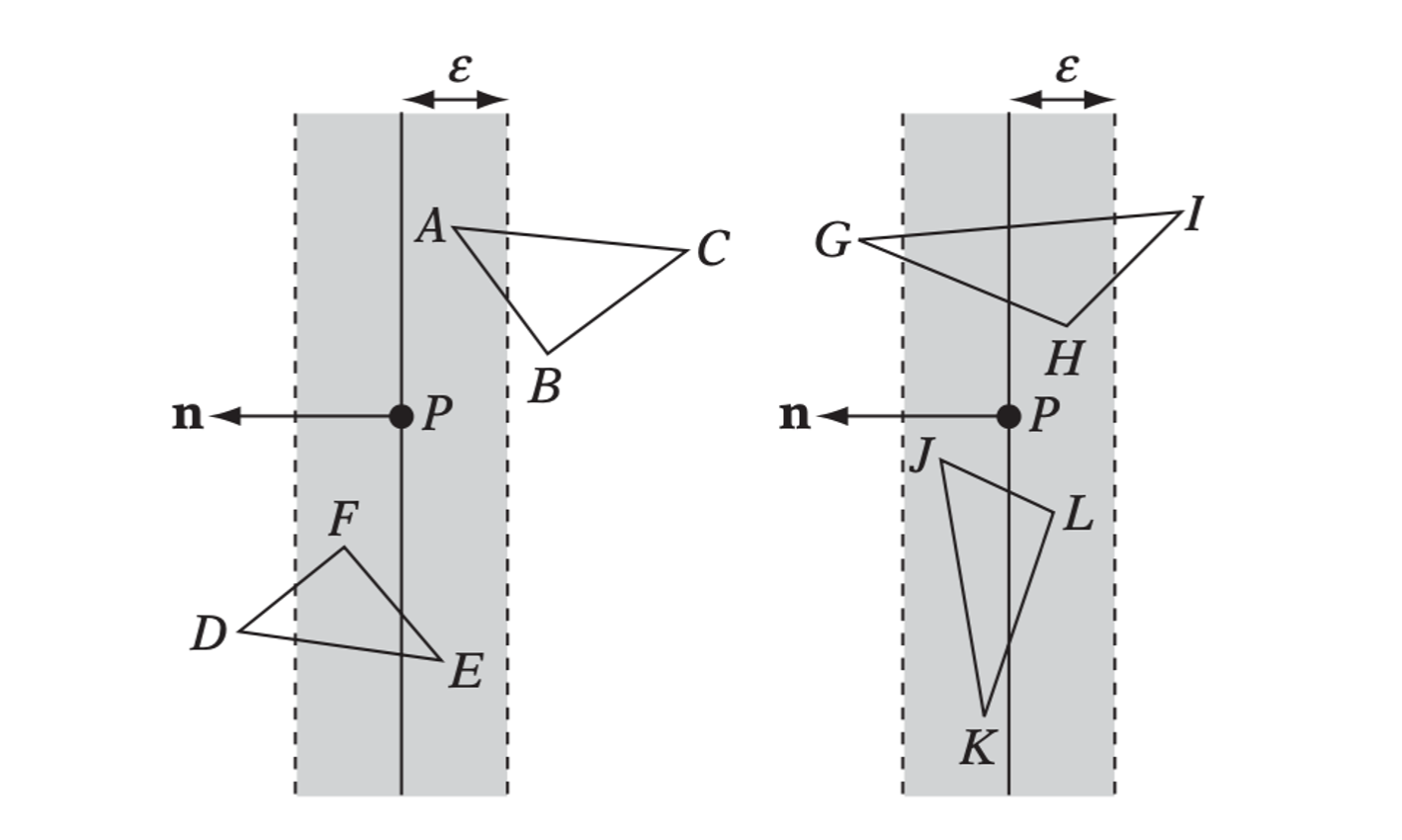
Considering with the floating point accuracy, thick
planes are used. Rules of classifying different categories.
Triangle ABC lies behind the
plane and triangle DEF lies in front of the plane. Triangle
GHI straddles the plane and triangle JKL lies on the
plane.
// Return value specifying whether the polygon ‘poly’ lies in front of, // behind of, on, or straddles the plane ‘plane’ intClassifyPolygonToPlane(Polygon *poly, Plane plane){ // Loop over all polygon vertices and count how many vertices // lie in front of and how many lie behind of the thickened plane int numInFront = 0, numBehind = 0; int numVerts = poly->NumVertices(); for (int i = 0; i < numVerts; i++) { Point p = poly->GetVertex(i); switch (ClassifyPointToPlane(p, plane)) { case POINT_IN_FRONT_OF_PLANE: numInFront++; break; case POINT_BEHIND_PLANE: numBehind++; break; } } // If vertices on both sides of the plane, the polygon is straddling if (numBehind != 0 && numInFront != 0) return POLYGON_STRADDLING_PLANE; // If one or more vertices in front of the plane and no vertices behind // the plane, the polygon lies in front of the plane if (numInFront != 0) return POLYGON_IN_FRONT_OF_PLANE; // Ditto, the polygon lies behind the plane if no vertices in front of // the plane, and one or more vertices behind the plane if (numBehind != 0) return POLYGON_BEHIND_PLANE; // All vertices lie on the plane so the polygon is coplanar with the plane return POLYGON_COPLANAR_WITH_PLANE; }
Splitting Polygons Against a
Plane
During BSP tree construction, when a polygon is found straddling a
dividing plane it must be split in two.
The act of clipping the polygon against a plane is commonly performed
using the Sutherland-Hodgman clipping algorithm.
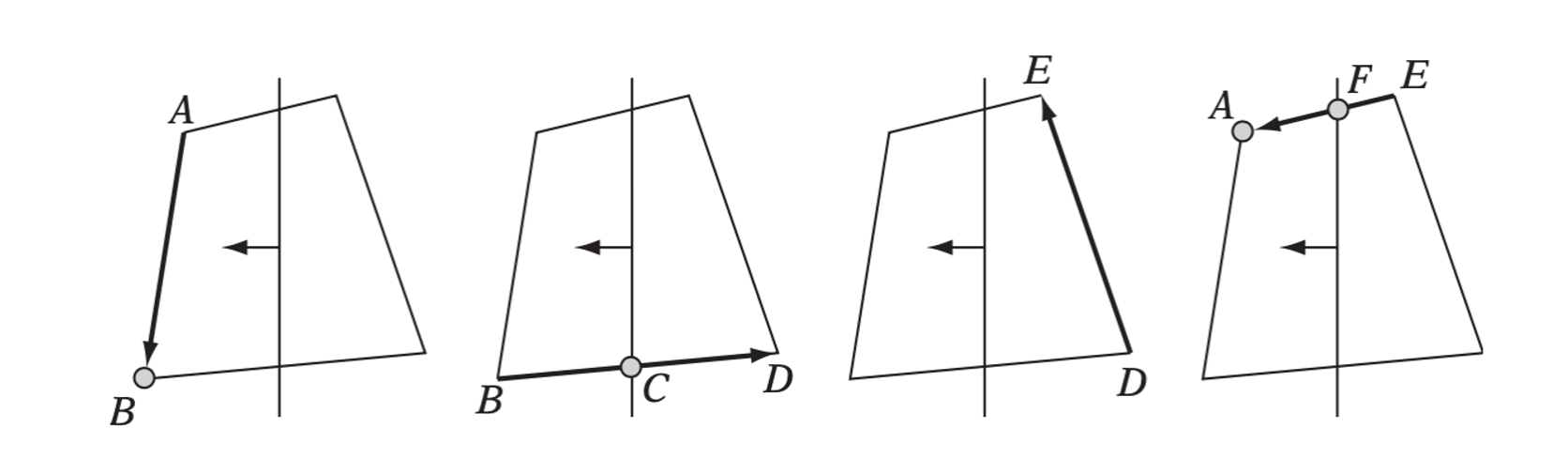
Clipping the polygon ABDE
illustrates the four cases of the Sutherland-Hodgman polygon-clipping
algorithm. The points of the output polygon BCFA are shown in
gray in the cases in which they are output.
Clipping the polygon ABDE illustrates the four cases of the
Sutherland-Hodgman polygon-clipping algorithm. The points of the output
polygon BCFA are shown in gray in the cases in which they are
output.
The algorithm proceeds one polygon edge at a time and has four cases
based on what sides of the clipping plane the edge startpoints and
endpoints lie.
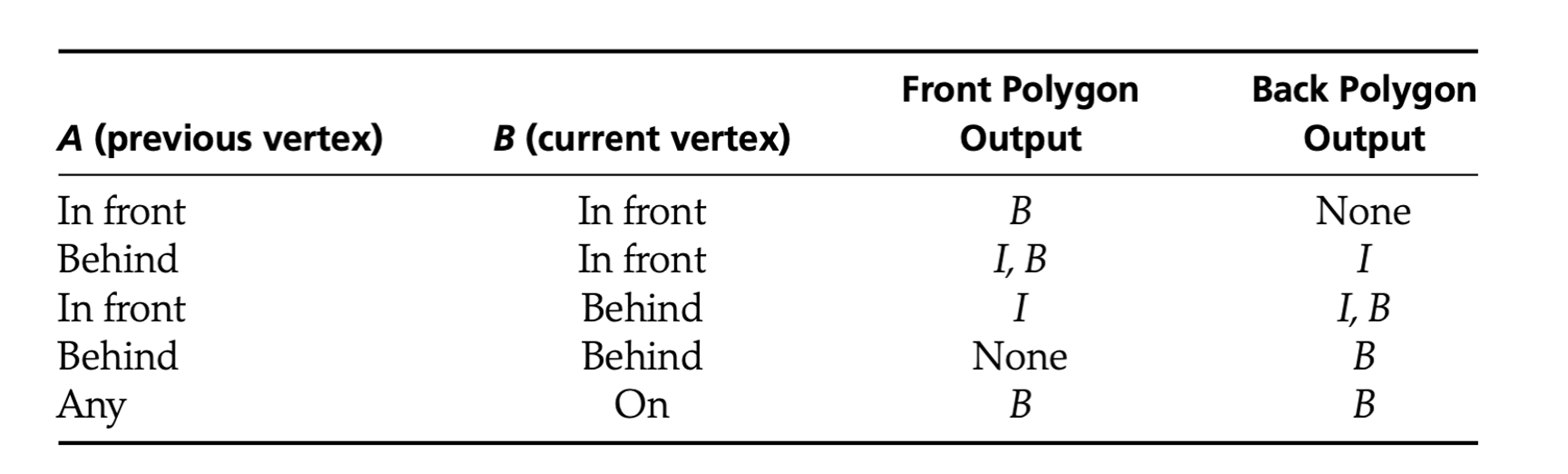
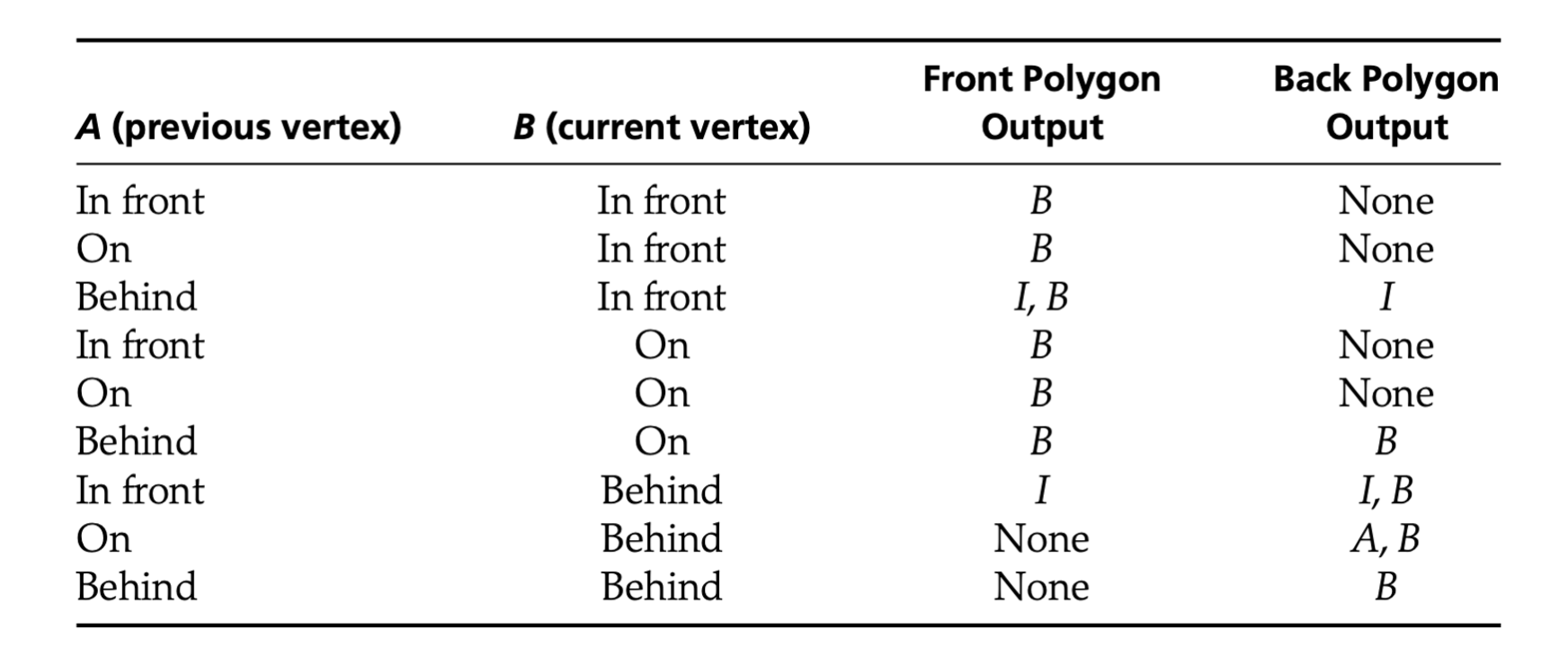
Output rules for the modified
Sutherland–Hodgman clipping algorithm dealing with a thickened plane and
retaining both parts of the polygon. The rules are given in terms of the
directed segment AB. I represents the intersection
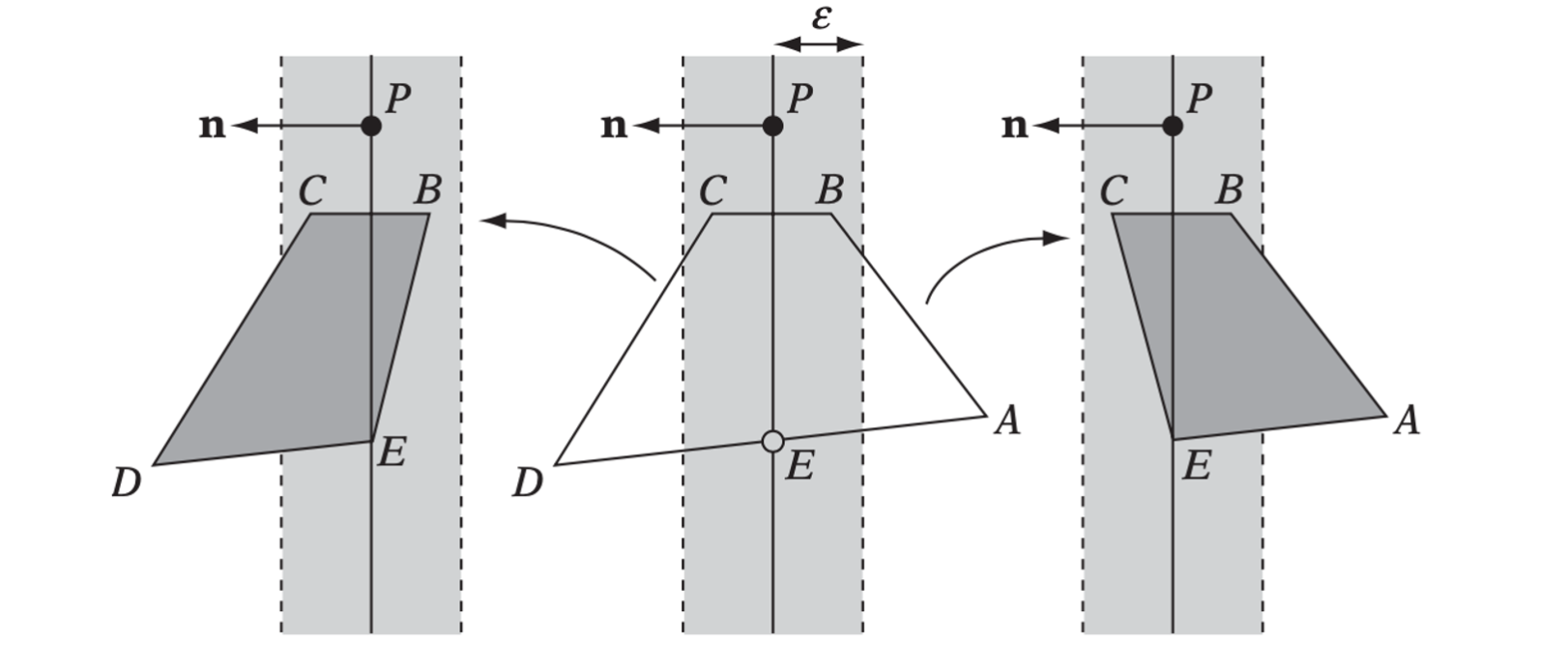
point of AB with the clipping plane.A potential problem with the modified
clipping algorithm is that the resulting pieces (shown in dark gray) may
overlap.
For robust clipping of the polygon, so that no overlap exists between
the generated pieces, a full set of all nine possible cases is
necessary.
The final modified clipping algorithm for
robustly clipping a polygon against a thick plane.
voidSplitPolygon(Polygon &poly, Plane plane, Polygon **frontPoly, Polygon **backPoly){ int numFront = 0, numBack = 0; Point frontVerts[MAX_POINTS], backVerts[MAX_POINTS];
// Test all edges (a, b) starting with edge from last to first vertex int numVerts = poly.NumVertices(); Point a = poly.GetVertex(numVerts – 1); int aSide = ClassifyPointToPlane(a, plane);
// Loop over all edges given by vertex pair (n - 1, n) for (int n = 0; n < numVerts; n++) { Point b = poly.GetVertex(n); int bSide = ClassifyPointToPlane(b, plane); if (bSide == POINT_IN_FRONT_OF_PLANE) { if (aSide == POINT_BEHIND_PLANE) { // Edge (a, b) straddles, output intersection point to both sides Point i = IntersectEdgeAgainstPlane(a, b, plane); assert(ClassifyPointToPlane(i, plane) == POINT_ON_PLANE); frontVerts[numFront++] = backVerts[numBack++] = i; } // In all three cases, output b to the front side frontVerts[numFront++] = b; } elseif (bSide == POINT_BEHIND_PLANE) { if (aSide == POINT_IN_FRONT_OF_PLANE) { // Edge (a, b) straddles plane, output intersection point Point i = IntersectEdgeAgainstPlane(a, b, plane); assert(ClassifyPointToPlane(i, plane) == POINT_ON_PLANE); frontVerts[numFront++] = backVerts[numBack++] = i; } elseif (aSide == POINT_ON_PLANE) { // Output a when edge (a, b) goes from ‘on’ to ‘behind’ plane backVerts[numBack++] = a; } // In all three cases, output b to the back side backVerts[numBack++] = b; } else { // b is on the plane. In all three cases output b to the front side frontVerts[numFront++] = b; // In one case, also output b to back side if (aSide == POINT_BEHIND_PLANE) backVerts[numBack++] = b; } // Keep b as the starting point of the next edge a = b; aSide = bSide; }
// Create (and return) two new polygons from the two vertex lists *frontPoly = newPolygon(numFront, frontVerts); *backPoly = newPolygon(numBack, backVerts); }
Splitting Robustness
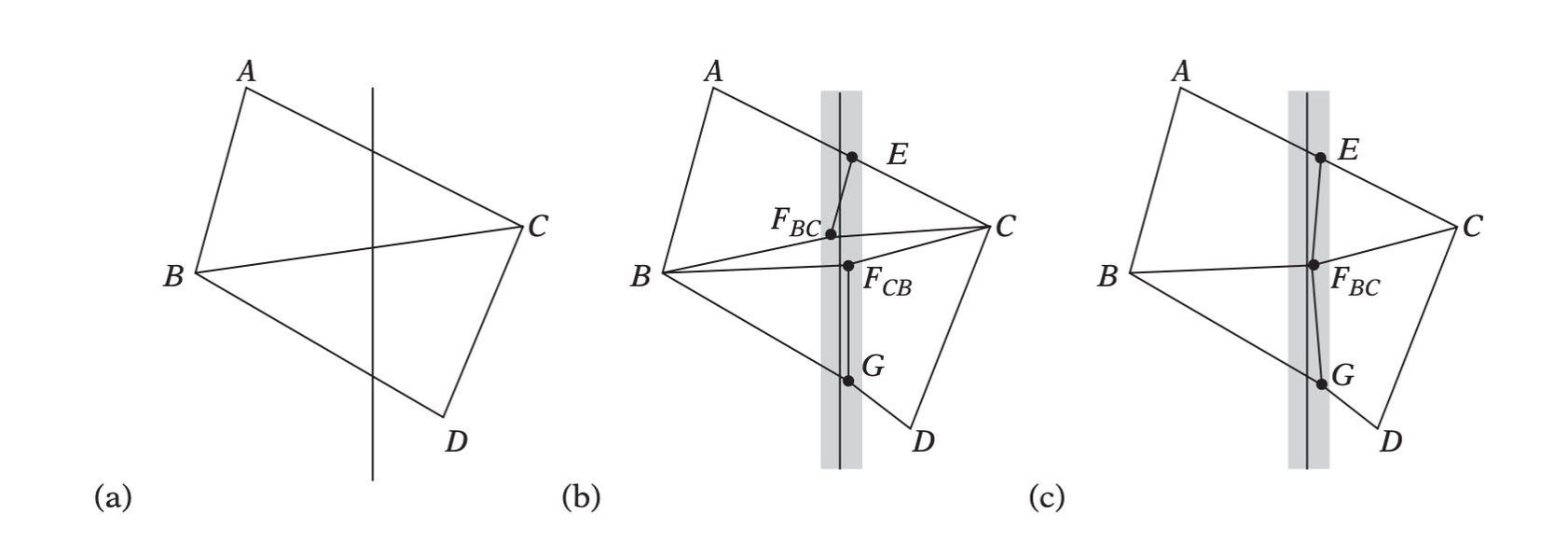
Consider the situation below. Two triangles \(ABC\) and \(CBD\) are given with their points in
counterclockwise. When splitting, due to the differences between
floating point arithmetic and real arithmetic, intersecting \(BC\) against a plane \(P\) does not, in general, result in the
same intersection point as intersecting \(CB\) with the same plane.
(a) Original geometry of two triangles
intersecting a plane. (b) Inconsistent handling of the shared edge
results in two different intersection points, which introduces
cracking. (c) The correct result when the shared edge is
handled consistently.
To robustly deal with this case, the clipping code must always
intersect the given edge consistently as either \(BC\) or \(CB\), but not both.
... if (bSide == POINT_IN_FRONT_OF_PLANE) { if (aSide == POINT_BEHIND_PLANE) { // Edge (a, b) straddles, output intersection point to both sides. // Consistently clip edge as ordered going from in front -> behind Point i = IntersectEdgeAgainstPlane(b, a, plane); ... } ...
Using the BSP Tree
Testing a Point
Against a Solid-leaf BSP Tree
Testing if a point lies in empty or solid space of a solid-leaf BSP
tree is a largely straightforward application. At each node, the point
is evaluated with respect to the dividing plane at that node. If the
point lies in front of the plane, the child node representing the front
tree is visited, and vice versa. Traversal continues until a leaf node
is reached, at which point the solidity of the leaf indicates the
result.
intPointInSolidSpace(BSPNode *node, Point p){ while (!node->IsLeaf()) { // Compute distance of point to dividing plane float dist = Dot(node->plane.n, p) - node->plane.d; if (dist > EPSILON) { // Point in front of plane, so traverse front of tree node = node->child[0]; } elseif (dist < -EPSILON) { // Point behind of plane, so traverse back of tree node = node->child[1]; } else { // Point on dividing plane; must traverse both sides int front = PointInSolidSpace(node->child[0], p); int back = PointInSolidSpace(node->child[1], p); // If results agree, return that, else point is on boundary return (front == back) ? front : POINT_ON_BOUNDARY; } } // Now at a leaf, inside/outside status determined by solid flag return node->IsSolid() ? POINT_INSIDE : POINT_OUTSIDE; }
Intersecting a
Ray Against a Solid-leaf BSP Tree
The routine to intersect the ray \(R(t) = P
+ t\textbf{d}, t \in [t_{\min}, t_{\max}]\) against a solid-leaf
BSP tree as follows. The time \(t_{hit}\) of the first intersection with a
solid leaf is returned when such an intersection exists.
// Intersect ray/segment R(t) = p + t*d, tmin <= t <= tmax, against bsp tree // ’node’, returning time thit of first intersection with a solid leaf, if any intRayIntersect(BSPNode *node, Point p, Vector d, float tmin, float tmax, float *thit){ std::stack<BSPNode *> nodeStack; std::stack<float> timeStack;
assert(node != NULL);
while (1) { if (!node->IsLeaf()) { float denom = Dot(node->plane.n, d); float dist = node->plane.d - Dot(node->plane.n, p); int nearIndex = dist > 0.0f; // If denom is zero, ray runs parallel to plane. In this case, // just fall through to visit the near side (the one p lies on) if (denom != 0.0f) { float t = dist / denom; if (0.0f <= t && t <= tmax) { if (t >= tmin) { // Straddling, push far side onto stack,then visit near side nodeStack.push(node->child[1 ∧ nearIndex]); timeStack.push(tmax); tmax = t; } else nearIndex = 1 ∧ nearIndex; // 0 <= t < tmin, visit far side } } node = node->child[nearIndex]; } else { // Now at a leaf. If it is solid, there’s a hit at time tmin, so exit if (node->IsSolid()) { *thit = tmin; return1; } // Exit if no more subtrees to visit, else pop off a node and continue if (nodeStack.empty()) break; tmin = tmax; node = nodeStack.top(); nodeStack.pop(); tmax = timeStack.top(); timeStack.pop(); } } // No hit return0; }